搜题

问题详情
某物料搬动机械手的结构如图所示,动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。
相关热点: 机械手 自由度
未搜索到的试题可在搜索页快速提交,您可在会员中心"提交的题"快速查看答案。
收藏该题
查看答案

搜题

相关问题推荐
工业机器人一般由()组成。
A.主机
B.操作机
C.控制系统
D.驱动系统
E.机械手
以下关于机器人的定义描述正确的是:()
A.机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助可编程序操作来处理各种材料、零件、工具和专用装置,以执行种种任务。
B.机器人是一种能够进行编程并在自动控制下执行某些操作和移动作业任务的机械装置。
C.机器人是一种用于移动各种材料、零件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有编程能力的多功能机械手。
D.工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。
A.机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助可编程序操作来处理各种材料、零件、工具和专用装置,以执行种种任务。
B.机器人是一种能够进行编程并在自动控制下执行某些操作和移动作业任务的机械装置。
C.机器人是一种用于移动各种材料、零件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有编程能力的多功能机械手。
D.工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。
在工业机械手的结构中,其功能是用来改变物件的空间位置,即把工件传送到预定的工作位置的是机械手的()。
A、手部
B、腕部
C、臂部
D、位置检测系统
已知某物料搬动机械手的结构与动作过程如图所示,要求机械手的操作方式分为手动方式和自动方式。机械手有升降、水平移动、手爪夹持等3个自由度,采用电磁阀控制的气缸驱动,PLC控制。要求写出物料搬动机械手设计和产品开发的详细工程路线。物料搬动机械手结构原理图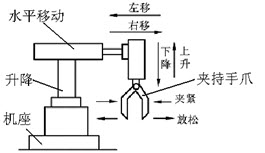
(多选题)液压捆扎机的单向节流阀组合,主要控制()的动作速度。
A送带速度
B机械手缸
C退带速度
D机械手